为了实现大型结构全周高精度三维动态变形测量,单套三维数字图像相关测量系统是无法满足需求的,需要使用多相机系统对测量区域进行拆分,每套系统测量其中的一部分区域,通过坐标系统一与数据融合从而实现大范围、全场、高精度变形测量。
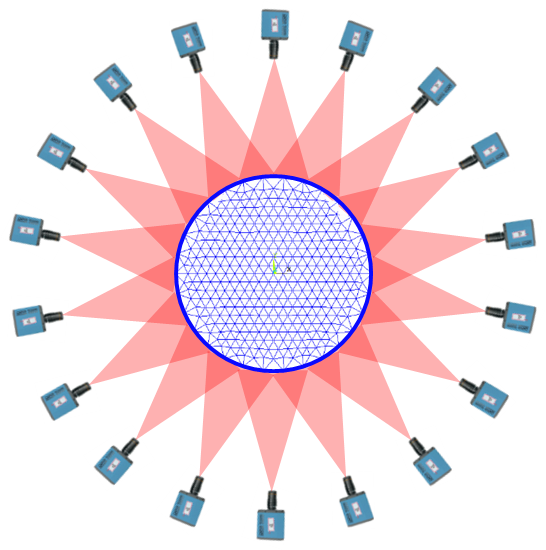
多相机全周变形测量示意图
现场实验主要分为两块,其一是对索进行静态的张拉实验,其次是结构的动态垮塌实验,均需要测量关键节点的位移变化。测量系统分为无人机辅助测量和多相机测量系统两个部分,基于无人机实现标志点三维重构用于静态张拉实验的节点测量,而由12台相机构成的多相机测量系统则负责结构全周的动态垮塌监测。利用结构表面大量布置的圆形编码标志点,实现所有无人机结果和多相机结果的坐标系统一。
实验的操作步骤为:
(1)在拉索张拉前后阶段,无人机使用优化后的飞行路径对节点处进行不断拍摄,见图(a),多张图片经过近景摄影测量方法计算,可以得到节点变形的高精度三维坐标。
(2)如图(b)所示,使用单反相机对地梁和边柱处的编码标志点进行拍摄,边柱上的编码标志点可以当做不动点,其摄影测量重构结果可用于坐标系的统一,图(c)为拉索张拉前后的变形结果均转至单反相机摄影测量坐标系。
(3)在网壳结构的连续倒塌实验中,12台相机可两两组成一套双目系统,多个相机通过硬触发同步,拍摄倒塌实验节点位移的全过程。

编码标志点的三维重构结果:(a) 无人机拍摄重构结果;(b) 单反相机拍摄重构结果;(c) 两套重构数据坐标系统一后的结果