本实验提出了一种基于水下三维相机阵列的方法,实现了深水环境下短工作距离、大视场、高精度的三维重建。该相机阵列由多个双目相机子系统组成,为保证测量结果的连续性,提出了一种统一子系统外部参数的方法。采用折射相机模型和标定方法消除了重建过程中的折射误差。在水下环境下,近红外随机散斑有利于图像的密集匹配与数字图像的相关。实验验证了该方法的准确性。平均重建误差小于1.1 mm。两个子系统在深度方向上的最大相对误差为2.61 mm,整体测量视场为700 mm × 700 mm。将三维相机阵列安装在水下机器人上,成功应用于水下结构缺陷检测。
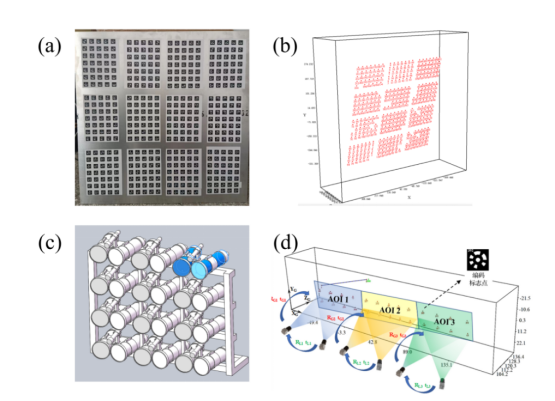
基于全局坐标系的水下三维阵列相机:(a)编码点标定板. (b)编码标定板特征点三维坐标. (c)阵列相机设计图. (d)水下阵列相机全局外参标定原理图
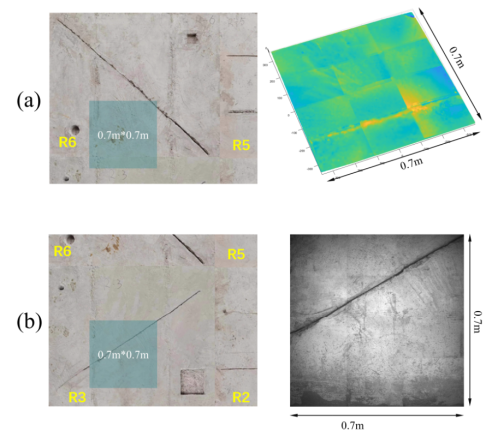
(a)水下阵列相机三维形貌测量结果. (b)水下阵列相机二维图像测量结果
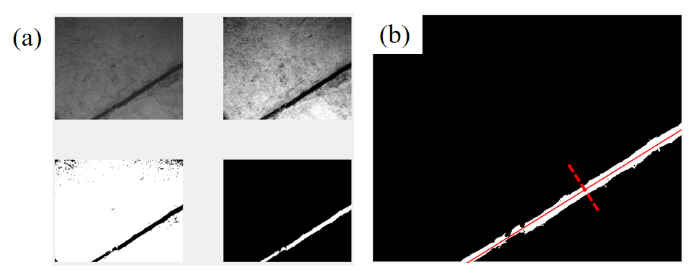
裂缝识别和宽度计算:(a)裂缝图像处理和识别. (b)裂缝宽度原理
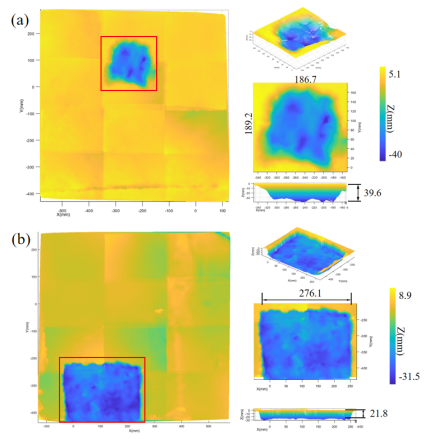
坝面缺陷识别与三维重建

换算比例 0.215mm/pixel
宽度平均像素 95.50pixel
平均宽度 20.53mm 真实值20mm
长度 294.55mm 真实值300mm